PROJECTS

SAFE4CAR
Title:
Sistema para garantizar condiciones de mínimo riesgo ante fallos de vehículos autónomos: integración con la infraestructura y experiencia de usuario (SAFE4CAR)
REF: PID2022-140554OB-C31
Duration: 09/2023 – 08/2026
Budget: 102.500 €
Objetivos.
El objetivo principal del proyecto consiste en identificar y analizar situaciones de fallo, comportamiento erróneo o potencialmente erróneo, o que no puede manejar un vehículo autónomo, y diseñar estrategias seguras de fallback para garantizar actuaciones de riesgo mínimo en esas circunstancias.
Resume:
La conducción cooperativa, conectada y autónoma constituye actualmente un importante avance tecnológico que influirá y cambiará nuestra movilidad y calidad de vida en el futuro. Aunque ha tenido un importante desarrollo en los últimos años, todavía se encuentran limitaciones para alcanzar los niveles más altos de automatización.
En concreto, este proyecto se centra en las condiciones que pueden provocar una desconexión del modo autónomo y cómo debe reaccionar el vehículo. Según los niveles de automatización, en los sistemas por debajo del Nivel 3, los roles de fallback (respaldo ante fallos) ante condiciones que no tenían contempladas o cuando se producen fallos en la tarea de conducción son realizados por los conductores humanos. Sin embargo, en el caso de alta automatización (Nivel 4) y automatización total (Nivel 5), las funciones de fallback ya no pueden ser abordadas por los conductores humanos, sino por el propio sistema autónomo.
En este sentido, el objetivo principal del proyecto coordinado consiste en identificar y analizar situaciones de fallo, comportamiento erróneo o potencialmente erróneo, o que no puede manejar un vehículo autónomo, y diseñar estrategias seguras de fallback para garantizar actuaciones de riesgo mínimo en esas circunstancias.
De esta forma, se pretende ir un paso más allá tanto en la detección de situaciones que imposibilitan la conducción autónoma de un vehículo en las condiciones para las que está preparado, así como en las medidas que éste deberá adoptar para mantener la seguridad sin intervención del conductor. Se pretende lograr el paso de soluciones de automatización nivel 3, a soluciones nivel 4 en las que el vehículo debe ser capaz de reaccionar ante cualquier situación, resolviéndola o pasando a un escenario de riesgo mínimo. Esto supone un salto científico-tecnológico claro en el avance de la conducción automatizada respecto al estado del arte.
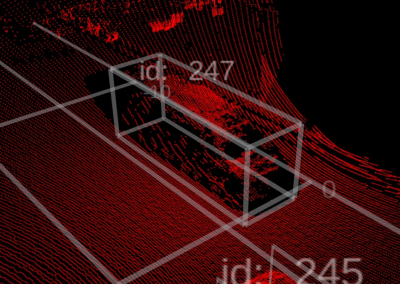
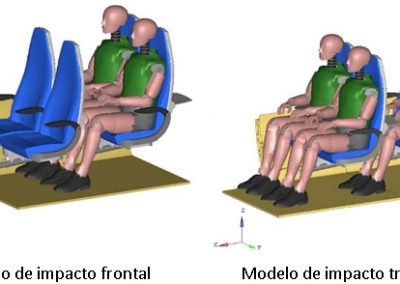
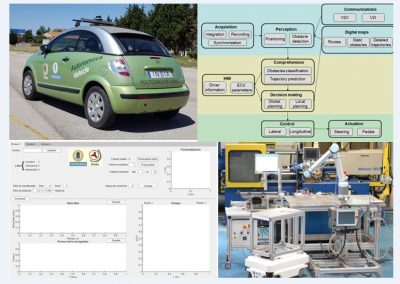
La solución propuesta parte de una identificación de los escenarios de fallo. Se distinguen causas internas del vehículo y causas externas. A partir de ellas, se profundiza en los problemas y soluciones que residen en los sistemas de percepción, como los fallos de sensores y la obtención de una conciencia situacional completa para la discriminación de las mejores alternativas de actuación. Por otra parte, se contemplan las comunicaciones inalámbricas con la infraestructura como una fuente adicional de información que puede permitir la ampliación del dominio de diseño operacional. Por último, se implementan los mecanismos de fallback en una unidad de control de vehículo autónomo. Estos mecanismos incluyen la prevención, la identificación y el tratamiento de los fallos con causas tanto internas como externas. Las soluciones consisten en llevar el vehículo a estados de riesgo mínimo con una reducción progresiva de la velocidad, con una parada segura, e incluso con maniobras evasivas. Los desarrollos parciales y el sistema final son validados mediante simuladores adaptados a tal fin, así como en escenarios reales con vehículos automatizados con unidades de control configurables, de forma que son valorados, no solo funcionalmente, sino desde la perspectiva de los usuarios.
Partners:
INSIA – UPM
Financing: Proyecto PID2022-140554OB-C31 de investigación financiado por MICIU/AEI /10.13039/501100011033/ y por FEDER, UE