PROYECTOS

SICOTRAM
Título:
«Sistemas cooperativos como soporte para transiciones seguras entre los modos automático y manual en conducción autónoma«
Ref.: SPIP2017-02324 Investigador principal del proyecto Dr. FELIPE JIMËNEZ ALONSO
Duración: 10/2017 – 09/2018
Subvención: €
Objetivos:
Partiendo de la experiencia en conducción autónoma y comunicaciones V2X, el objetivo es desarrollar aplicaciones de servicios C-ITS, que den asistencia a la conducción autónoma fundamentalmente en la situación concreta de transiciones entre modos automático y manual, manteniendo comunicación con otros vehículos y centros de control de tráfico.
Desarrollar aplicaciones para dar soporte de conducción autónoma en acceso, circulación y salida de infraestructuras determinadas
– Implementar y analizar soluciones de comunicaciones inalámbricas híbridas teniendo en cuenta los dos sistemas disponibles: C-ITS (ITS G5/DSRC) y telefonía 3/4G
– Analizar los procesos de transición automático-manual para establecer protocolos seguros de actuación
– Implementar y probar los sistemas en el vehículo autónomo de INSIA sobre el corredor cooperativo del proyecto H2020 AUTOCITS, cuyo alcance se pretende superar con comunicaciones V2V y nuevos servicios específicos.
Financiadores:
Proyecto enmarcado en el Plan de Investigación e Innovación en Seguridad Vial y Movilidad 2017-2020, que fue aprobado por la DGT. El proyecto ha participado en la convocatoria de subvenciones destinadas al desarrollo de proyectos de investigación del año 2017 (B.O.E, num. 52, de 2 de marzo) y está subvencionado de acuerdo a la Resolución de la DGT el 1 de diciembre de 2017.
Resumen:
La conducción autónoma es un área de gran interés, aunque aún le falta mucho desarrollo para que sea una realidad. Con la disponibilidad actual de vehículos autónomos de ensayo, es posible analizar casos de uso que involucren esta tecnología en situaciones concretas, suponiendo una mejora en la seguridad y eficiencia del transporte. Entre otras, una situación específica crítica para la seguridad que debe ser contemplada según se avance hacia niveles de automatización superiores es el periodo de tiempo próximo (tanto anterior como posterior) a las transiciones entre los modos automático-manual.
Un vehículo autónomo circulando de manera individual e independiente puede suponer un hito desde el punto de vista tecnológico, pero no es una aportación realista, ya que está sometido a las limitaciones del horizonte visual de los conductores. Es por ello que los vehículos autónomos deben implantarse como vehículos conectados, con otros vehículos y con la infraestructura y los centros de control de tráfico. Esta conectividad hace que los vehículos autónomos superen el horizonte visual, desarrollando lo que se denomina conducción autónoma cooperativa. Así, se considera imprescindible avanzar en el desarrollo de aplicaciones basadas en Sistemas Cooperativos (C-ITS) que sean capaces de resolver problemas concretos en la evolución de la conducción autónoma hacia una implantación realista. Sin embargo, los servicios cooperativos planteados como Day-1 y Day 1.5 están orientados a la conducción manual, pero se deben implantar nuevos servicios para fomentar niveles altos de automatización, fundamentalmente centrados en V2I con los centros de gestión de tráfico.
Por esto, partiendo de la experiencia en conducción autónoma y comunicaciones V2X del grupo investigador, el objetivo es el desarrollo de aplicaciones de C_ITS que den asistencia a la conducción autónoma fundamentalmente en las transiciones entre modos de funcionamiento del vehículo autónomo, manteniendo comunicación con otros vehículos y centros de gestión.
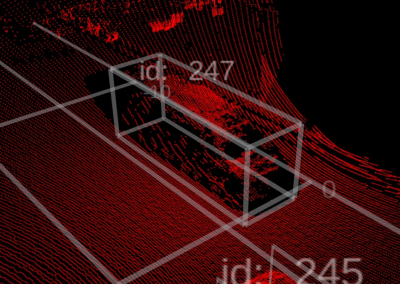
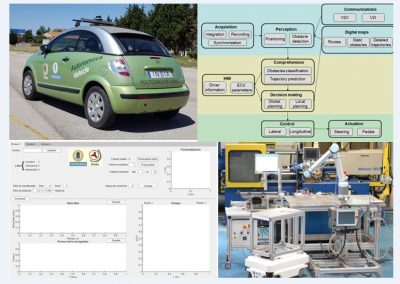
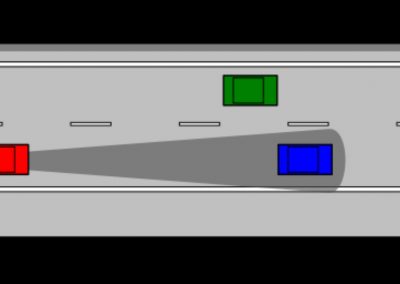
El grupo cuenta con un vehículo automatizado capaz de realizar trayectorias sin intervención humana. A partir de ahí, se plantea un demostrador de conducción autónoma cooperativa basado en comunicaciones inalámbricas para gestionar de forma eficiente dicha conducción autónoma, principalmente en las transiciones entre modos. En el demostrador propuesto, el vehículo autónomo conectado recibirá avisos y autorizaciones por parte del centro de control para acceder a una determinada infraestructura en función de las condiciones y para conmutar al modo automático. De igual forma, desde el centro de control, se proporcionan consignas de velocidad en función de las condiciones. El vehículo realizará la ruta de manera automática, conectada y segura, comunicándose con el resto vehículos para favorecer la conducción cooperativa. Al finalizar la ruta para la que el modo autónomo puede estar operativo, se habilitará un procedimiento para asegurar la transición segura automático/manual y se facilitará la incorporación al tráfico convencional de la otra vía en condiciones de seguridad mediante comunicaciones entre vehículos. En los vehículos se utilizarán módulos híbridos de comunicaciones INSIA-ITS, que incorporan C-ITS (ITS G5/DSRC) y telefonía móvil 3/4G, analizando su rendimiento para la aplicación seleccionada. El demostrador final aprovechará el corredor cooperativo que se está desplegando en el carril Bus-VAO de la A6 en el proyecto H2020 AUTOCITS.