PROYECTOS

ADAS ROAD
Título:
Sistema avanzado de asistencia a la conducción para entornos interurbanos. (ADAS-ROAD)
Duración: 2014 – 2016
Subvención: €
Objetivos:
Los sistemas de seguridad en los automóviles han sufrido un gran cambio en los últimos años a raíz del desarrollo de las Tecnologías de la Información. Estos sistemas, aplicados al sector del transporte, abren numerosas posibilidades de aplicación para mejorar el transporte por carretera. En este proyecto se incide sobre dos aspectos que han sido identificados como clave para el sector de la automoción: seguridad y eficiencia. Para ello, se ha desarrollado un sistema avanzado de asistencia a la conducción (ADAS) para entornos interurbanos, principalmente carreteras convencionales, infraestructuras menos preparadas y de mayor complejidad frente a los entornos de autopistas y autovías. El sistema está basado en las más avanzadas técnicas de percepción sensorial y en comunicaciones tanto entre vehículos (V2V), como con la infraestructura (V2I).
Para garantizar el procesamiento de la información sensorial, se ha desarrollado una arquitectura de fusión sensorial basada, entre otros, en visión por computador y tecnología láser, que permite la detección y clasificación en tiempo real de los obstáculos presentes en la vía, así como la identificación de los potenciales riesgos. A su vez, se ha planteado un sistema de comunicación multimodal V2V y V2I basado en GeoNetworking, que facilita el flujo de información entre vehículos y colabora en la etapa la detección y retransmisión. Todo ello, junto con tecnologías de posicionamiento del vehículo basadas en mapas digitales, ha permitido establecer los algoritmos de decisión de los diferentes sistemas ADAS considerados.
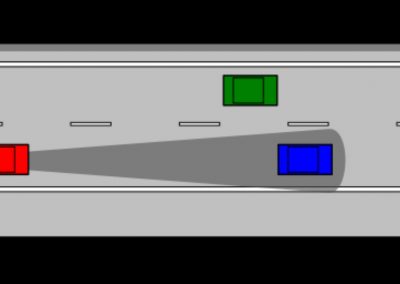
Las distintas aplicaciones desarrolladas incluyen: un sistema de asistencia al adelantamiento en vías convencionales, que analiza la evolución más adecuada de la velocidad y el tramo idóneo para adelantar; asistencia en intersecciones, con control de la velocidad durante la aproximación; control de crucero adaptativo, con optimización del consumo; y un sistema de evitación de colisiones y atropellos con posibilidad de realizar maniobras de esquiva. Para ello, se han empleado modelos matemáticos de dinámica vehicular que garantizan la estabilidad del vehículo, modelos de la cadena de propulsión para establecer patrones de comportamiento eficientes, Inteligencia Artificial y entornos de simulación para circulación por carretera, que han permitido la experimentación y evaluación de los procesos implementados en la unidad de control.
El sistema propuesto constituye un avance científico y tecnológico en el marco de los Sistemas Inteligentes de Transporte, claramente situado en el reto de transporte inteligente, ecológico e integrado, dentro de la Estrategia Española de Ciencia y Tecnología y de Innovación y del programa de trabajo del Horizonte 2020. Con el fin de obtener un transporte por carretera más seguro y eficiente, este proyecto está enfocado a escenarios concretos dentro de la circulación por carreteras convencionales, asumiendo la particular problemática de éstas y siendo éste un enfoque novedoso en el panorama internacional, dentro de los sistemas ADAS convencionales, vinculados a entornos más controlados, o con velocidades de circulación inferiores.
Participantes:
Instituto Universitario de Investigación del Automóvil (INSIA – UPM), Universidad Carlos III de Madrid, Universidad Europea de Madrid
Financiadores:
Resultados:
El proyecto involucra diferentes tecnologías como:
· Percepción del entorno
· Modelos matemáticos del comportamiento del vehículo
· Simuladores de conducción
· Automatización de la conducción
· Comunicaciones V2X
Percepción:
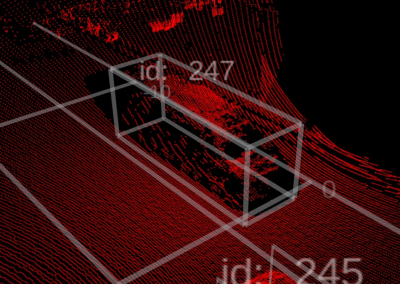
Se ha completado la definición, análisis y diseño del sistema de percepción y se está trabajando en el desarrollo de los módulos de percepción del entorno viario y en la implementación de la arquitectura de fusión sensorial que permita detectar y estimar el movimiento de los obstáculos (coches, motos, ciclistas, peatones, etc.) de forma fiable y robusta.
Atendiendo a los resultados obtenidos con los diferentes sistemas de percepción, se ha definido un sistema basado fundamentalmente en visión por computador y tecnología láser para realizar el modelado de la carretera, identificar los posibles obstáculos, así como las zonas libres. De igual forma, la identificación de zonas libres utilizando un mapa digital detallado de la carretera, complementa la información de ésta que pueda extraerse del propio sistema de percepción.
Los algoritmos de fusión sensorial integran la información obtenida por el sistema con la proporcionada por medio de otras vías, como las comunicaciones intervehiculares.
Comunicaciones V2X:
Se ha trabajado en la implementación de los algoritmos de GeoNetworking en plataformas IEEE 802.11p. y se ha desarrollado la mensajería de comunicaciones necesaria para dar soporte a los sistemas cooperativos.
Se han realizado pruebas del nuevo módulo de comunicaciones ITS-INSIA que se basa en el estándar Europeo ETSI-TS102 6X y ofrece nuevas funcionalidades, tales como conectividad nativa GPS, Bluetooth, WiFi o Bus CAN. Además, para asegurar la compatibilidad del módulo con otros fabricantes, se ha implementado el estándar de GeoNetworking sobre ETSI-TS1026X y su extensión sobre prototipos IEEE 802.11p. Las pruebas se han realizado en entornos controlados en pista y carretera, incluyendo otros vehículos, peatones, motoristas y ciclistas, y se han implantado los servicios cooperativos, yaintegrados con el sistema de percepción.
También se han implantado las comunicaciones entre un servidor y dispositivos móviles embarcados
Modelos matemáticos:
Se ha completado el estudio de dinámica vehicular, así como el diseño de los modelos y algoritmos para conducción eco-eficiente.
Así, por un lado, se han definido las maniobras de esquiva estables que se ajusten a un comportamiento intuitivo y seguro, que deban ser implementadas por el vehículo autónomo en caso de tener que realizar una maniobra de esquiva.
Además, haciendo uso de Programación Dinámica, se han desarrollado algoritmos para el cálculo de perfiles de velocidad para optimizar el consumo atendiendo al vehículo, la geometría de la carretera y las condiciones de circulación. Se han realizado pruebas sobre escenarios reales con ahorros significativos en el consumo sin incidir en el tiempo de viaje.
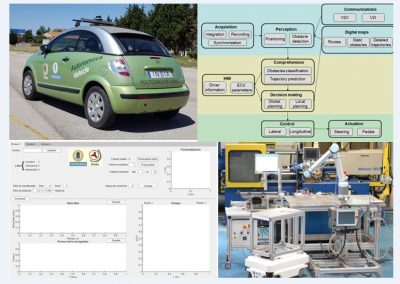
Entorno de simulación:
Se ha completado la definición, análisis y diseño de la plataforma de simulación, y se ha desarrollado la plataforma de experimentación y de la unidad de control inteligente en la plataforma de experimentación. Se han identificado 2 rutas de carreteras convencionales en los alrededores de Madrid, cuyas características orográficas y del entorno hacen que los sistemas desarrollados puedan tener un alto potencial para mejorar la seguridad. Trabajando a partir de coordenadas GPS y vídeos, se ha logrado reproducir los trayectos reales por los que circulan las dos plataformas de experimentación
Unidad de control:
Dentro de este objetivo se ha implementado la unidad de control con los algoritmos que permiten la gestión del sistema integrado de asistencia a la conducción (ADAS) para entornos interurbanos, planteado como objetivo principal del proyecto coordinado, orientado a mejorar tanto la seguridad como la eficiencia, a través del desarrollo de una serie de aplicaciones concretas. En concreto, se han implementado los siguientes sistemas de control autónomo o semi-autónomo del vehículo:
· Control de crucero adaptativo
· Sistema de asistencia al adelantamiento
· Asistencia en intersecciones
· Sistema de evitación de colisiones