PROYECTOS

SAMPLER
Título:
«Sistema de Activación de Medidas Pre-Colisión para Evitar Accidentes en Entornos Urbanos» (SAMPLER)
Duración: 2011– 2013
Subvención: €
Objetivos:
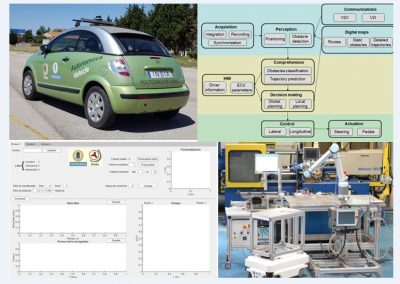
Durante la conducción, se presentan situaciones en las que la actuación del conductor puede no ser la óptima, por disponer de una información parcial, procesar la información recibida erróneamente o tomar decisiones equivocadas. Con el fin de paliar esas carencias, se ha venido promoviendo el desarrollo e incorporación en los vehículos de sistemas de asistencia orientados a proporcionar información adicional, alertar de situaciones potencialmente peligrosas o, incluso, actuar ante dichas situaciones. Dentro del proyecto “Sistema de activación de medidas pre-colisión para evitar accidentes en entornos urbanos. SAMPLER” se ha trabajado en la detección de obstáculos de forma fiable y en la automatización de vehículos con el fin de que sean capaces de realizar maniobras de forma autónoma para la evitación de colisiones.
Participantes:
Financiadores:
Resultados:
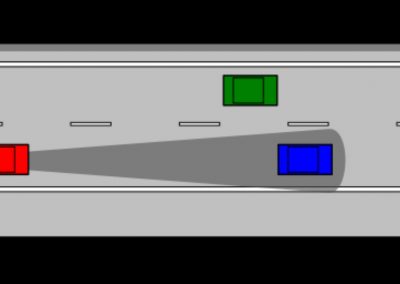
Para lograr resultados positivos en los sistemas de evitación de colisiones es necesario que sean capaces de enjuiciar de una forma coherente aquellas situaciones que conllevan riesgo y evitar dar falsas alarmas que lleven a acciones incorrectas y perturbadoras para el tráfico que hagan al conductor perder su confianza en el sistema. Por ello, se plantean algoritmos que mejoran los ya existentes para la detección, identificación y caracterización de obstáculos por medio de la información proporcionada por un láser. En concreto, las aportaciones más relevantes son: 1) la fusión de la información del láser con un sistema de posicionamiento, teniendo en cuenta la calidad de éste último; 2) los criterios para la localización de obstáculos (proceso de segmentación), superando las limitaciones de otros enfoques que obvian la influencia de la orientación del obstáculo; 3) el método de definir los ejes característicos de los obstáculos, sin recurrir a valores de tolerancias difícilmente ajustables o reduciendo la influencia de errores en las mediciones de distancias del láser. Estos algoritmos han sido probados empleando un láser Sick LRS 1000 de largo alcance, alcanzándose resultados satisfactorios que mejoran los proporcionados por otros métodos.
Además, se ha desarrollado el control de bajo nivel que actúa sobre los mandos del vehículo. La automatización incluye el control de la velocidad, a través de acciones sobre el acelerador y el freno, y de la dirección. Cabe indicarse que se ha perseguido que la respuesta del sistema se aproxime, en la medida de lo posible, a la respuesta esperable de un conductor por medio de controladores borrosos de los actuadores. El diseño de la automatización ha implicado el uso de equipos comerciales de control y el diseño de elementos electrónicos y mecánicos. El sistema de control recibe las señales de consigna de un sistema externo de más alto nivel y también recoge las medidas de posición del volante y velocidad del vehículo. Por otra parte, actúa sobre pedales y volante mediante señales que son distribuidas desde una tarjeta de adquisición a los diferentes componentes del sistema. Por último, se establece un sistema de seguridad de frenada de emergencia mediante un control remoto. Con el diseño desarrollado, se logra el control de los mandos del vehículo que permite una respuesta rápida casi en cualquier circunstancia de conducción.